編碼器(encoder)是將信號(hào)或數(shù)據(jù)進(jìn)行編制�、轉(zhuǎn)換為可用以通訊、傳輸和存儲(chǔ)的信號(hào)形式的設(shè)備�。編碼器把角位移或直線位移轉(zhuǎn)換成電信號(hào)�����,前者稱為碼盤(pán)���,后者稱為碼尺。編碼器是伺服驅(qū)動(dòng)系統(tǒng)最重要的組成成分之一���,編碼器的品質(zhì)和精度直接決定伺服系統(tǒng)的品質(zhì)與精度����。
編碼器按照工作原理編碼器可分為增量式和絕對(duì)式兩類�。
1.1增量式編碼器
增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖���,用脈沖的個(gè)數(shù)表示位移的大小�。

增量編碼器的典型光路結(jié)構(gòu)圖
紅外發(fā)光管通過(guò)透鏡把發(fā)散的光變成平行單一方向的光��,向碼盤(pán)垂直照射過(guò)去��。
碼盤(pán)鍍上了擋光材料�,同時(shí)沿碼盤(pán)一周均勻刻畫(huà)出N條通光窗口,即碼道。若碼盤(pán)轉(zhuǎn)過(guò)一圈����,將產(chǎn)生N次的通光和遮光。
把受碼盤(pán)調(diào)制的光垂直照射到感光元件—光電池上�,光電池受光會(huì)產(chǎn)生電流,遮光則沒(méi)有電流�����。把電流轉(zhuǎn)化為電壓信號(hào)��,若碼盤(pán)轉(zhuǎn)過(guò)一圈����,將產(chǎn)生N次的高低電平,即脈沖信號(hào)����。
由于碼盤(pán)跟隨電機(jī)軸轉(zhuǎn)動(dòng)�����,對(duì)脈沖進(jìn)行計(jì)數(shù)即可求得位置的增量信息或者求得單位時(shí)間內(nèi)的轉(zhuǎn)速���。
1.2 絕對(duì)值式編碼器
絕對(duì)編碼器因其通過(guò)機(jī)械位置決定的每個(gè)位置是唯一的���,無(wú)需記憶�����,無(wú)需找參考點(diǎn)�,不用一直計(jì)數(shù)����,什么時(shí)候需要知道位置,什么時(shí)候就去讀取它的位置���。這樣�����,編碼器的抗干擾特性���、數(shù)據(jù)可靠性都會(huì)有所提高。
絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼����,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與測(cè)量的中間過(guò)程無(wú)關(guān)。
絕對(duì)編碼器光碼盤(pán)上有許多道光通道刻線��,每道刻線依次以2線�����、4線�����、8線����、16線….編排,在編碼器的每一個(gè)位置���,通過(guò)讀取每道刻線的通���、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進(jìn)制編碼(格雷碼)�,這就稱為n位絕對(duì)編碼器。
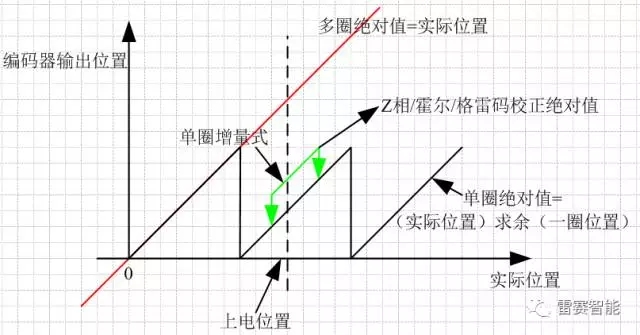
n位絕對(duì)編碼器又可以分為單圈絕對(duì)值編碼器與多圈絕對(duì)值編碼器�����。
單圈絕對(duì)值編碼器:只能用于旋轉(zhuǎn)范圍360度以內(nèi)的測(cè)量����,轉(zhuǎn)動(dòng)超過(guò)360度時(shí),編碼又回到原點(diǎn)�,稱為單圈絕對(duì)值編碼器 。
這樣的編碼器是由碼盤(pán)的機(jī)械位置決定的�,它不受停電、干擾的影響在轉(zhuǎn)動(dòng)中測(cè)量光電碼盤(pán)各道刻線���,以獲取唯一的編碼���,當(dāng)轉(zhuǎn)動(dòng)超過(guò)360度時(shí),編碼又回到原點(diǎn)�����,這樣就不符合絕對(duì)編碼唯一的原則�����,這樣的編碼器只能用于旋轉(zhuǎn)范圍360度以內(nèi)的測(cè)量����,碼盤(pán)上的每一個(gè)位置都有唯一的編碼���,每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,這稱為單圈絕對(duì)值編碼器���。
多圈絕對(duì)值編碼器:在單圈編碼的基礎(chǔ)上再增加圈數(shù)的編碼����,以擴(kuò)大編碼器的測(cè)量范圍���,這樣的絕對(duì)編碼器就稱為多圈式絕對(duì)編碼器 ���。
如果要測(cè)量旋轉(zhuǎn)超過(guò)360度范圍,就要用到多圈絕對(duì)式編碼器�����。編碼器生產(chǎn)廠家運(yùn)用鐘表齒輪機(jī)械的原理���,當(dāng)中心碼盤(pán)旋轉(zhuǎn)時(shí)����,通過(guò)齒輪傳動(dòng)另一組碼盤(pán)(或多組齒輪�����,多組碼盤(pán))��,在單圈編碼的基礎(chǔ)上再增加圈數(shù)的編碼��,以擴(kuò)大編碼器的測(cè)量范圍�����,它同樣由機(jī)械位置確定編碼����,每個(gè)位置編碼唯一不重復(fù),而無(wú)需記憶����。
各編碼器優(yōu)劣勢(shì)分析







板 1白.png)

-02.png)