EtherCAT是目前工業(yè)以太網(wǎng)中一種主流的總線通訊協(xié)議�����,相比傳統(tǒng)的工業(yè)以太網(wǎng)�����,有著眾多突出的優(yōu)點(diǎn)、應(yīng)用簡單是EtherCAT總線的一個(gè)顯著特點(diǎn)���。
應(yīng)用簡單��?��!關(guān)于EtherCAT總線的應(yīng)用具有以下幾個(gè)特點(diǎn):
1)拓?fù)潇`活——幾乎支持任何形式網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
2)線纜長度最大1000米�,節(jié)點(diǎn)之間的線纜長度無需規(guī)劃
3)節(jié)點(diǎn)地址自動(dòng)分配
4)通訊速率固定100M
5)無需配置通訊參數(shù)
6)無需再次優(yōu)化通訊參數(shù)
基于以上特點(diǎn)��,EtherCAT總線產(chǎn)品的應(yīng)用可以簡單分為以下幾個(gè)步驟:

本例程采用本公司EtherCAT步進(jìn)產(chǎn)品DM3E-556和歐姆龍控制器NJ501-1500為例進(jìn)行說明。
步驟1:硬件系統(tǒng)組建
硬件系統(tǒng)的搭建主要包含主站�����、從站和配套通訊線�,舉例:如下圖所示是NJ501-1500與兩臺(tái)DE3E-556的組網(wǎng)連接示意圖:
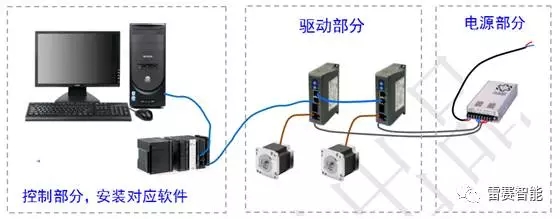
說明:
● 電腦安裝好編程環(huán)境Sysmac Studio;
● 控制器的Ethernet口與電腦的網(wǎng)口聯(lián)接�;
● 控制器的EtherCAT口與驅(qū)動(dòng)器的ECAT IN 聯(lián)接;
● 第一臺(tái)驅(qū)動(dòng)器的ECAT OUT 聯(lián)接下一臺(tái)驅(qū)動(dòng)器的ECATIN口�����;
步驟2:安裝設(shè)備描述文件
將設(shè)備描述文件DM3E-556.xml復(fù)制到編程環(huán)境對應(yīng)的安裝目錄下
OMRON\SysmacStudio\IODeviceProfiles\EsiFiles\UserEsiFiles
步驟3:添加主站和從站并配置參數(shù)
1)打開Sysmac Studio的編程環(huán)境�,新建工程,選擇對應(yīng)型號(hào)的控制器和軟件版本
2)在配置和設(shè)置——EtherCAT 主站下添加節(jié)點(diǎn)

3)在運(yùn)動(dòng)控制設(shè)置——軸設(shè)置——(右擊)添加軸��,設(shè)置軸參數(shù)�����,如圖所示



設(shè)置單位換算設(shè)置

設(shè)置速度參數(shù)

設(shè)置回原點(diǎn)方式

步驟4:編程�、聯(lián)機(jī)運(yùn)行
在編程——POUs——程序——Program0——Section0 添加程序


在線運(yùn)行:在程序編譯沒有錯(cuò)誤的條件下,設(shè)置通訊連接����,聯(lián)機(jī)后下載程序����,觸發(fā)程序的enable可以實(shí)現(xiàn)對電機(jī)的使能操作���,觸發(fā)hms可以觸發(fā)驅(qū)動(dòng)器的回原點(diǎn)�,觸發(fā)moveabs可以觸發(fā)驅(qū)動(dòng)器的絕對位置運(yùn)動(dòng)���。
至此��,EtherCAT的簡單聯(lián)機(jī)入門已經(jīng)完成了!









-02.png)


