自動(dòng)化設(shè)備回零的神奇新方法
作者: 發(fā)布時(shí)間:2020-10-22
編碼器Z信號(hào)���,一個(gè)自動(dòng)化設(shè)備回零的神奇新方法
精準(zhǔn)回到原點(diǎn)是自動(dòng)化設(shè)備最基本的功能���,目前常用的回零方式是采用接近開(kāi)關(guān)回零�,這種方式既占安裝空間又增加接線成本��,而且精度會(huì)因回原點(diǎn)速度�、機(jī)械誤差、溫度粉塵的影響而出現(xiàn)誤差���。為了讓自動(dòng)化設(shè)備回零更為準(zhǔn)確便捷��,雷賽智能引入閉環(huán)步進(jìn)電機(jī)編碼器Z信號(hào)來(lái)解決���,接下來(lái)將為您詳細(xì)介紹這種提升設(shè)備可靠性和競(jìng)爭(zhēng)力的回零新方法。
閉環(huán)步進(jìn)電機(jī)Z信號(hào)回零的優(yōu)勢(shì)
編碼器除了輸出A相���、B相信號(hào)測(cè)定負(fù)載角位移外�,還可通過(guò)碼盤上固定位置光柵對(duì)外輸出一個(gè)脈沖信號(hào)����,這個(gè)脈沖信號(hào)即Z信號(hào),電機(jī)每轉(zhuǎn)動(dòng)一圈輸出一個(gè)Z信號(hào)�����。由于碼盤和電機(jī)軸固定,Z信號(hào)輸出相對(duì)電機(jī)位置也是固定的���,將Z信號(hào)反饋到控制器�����,可視Z信號(hào)檢測(cè)點(diǎn)為設(shè)備零點(diǎn)��,依此便可實(shí)現(xiàn)設(shè)備回零���。
相比用接近開(kāi)關(guān)在“一定區(qū)域范圍”內(nèi)判定零點(diǎn),Z信號(hào)回零具有以下三點(diǎn)優(yōu)勢(shì):
1. 可省掉接近開(kāi)關(guān)����,減少安裝空間,機(jī)械結(jié)構(gòu)更簡(jiǎn)單
2. 減少人工接線和安裝���,同時(shí)提高了系統(tǒng)的可靠性
3. Z信號(hào)輸出更穩(wěn)定,回零精度更高
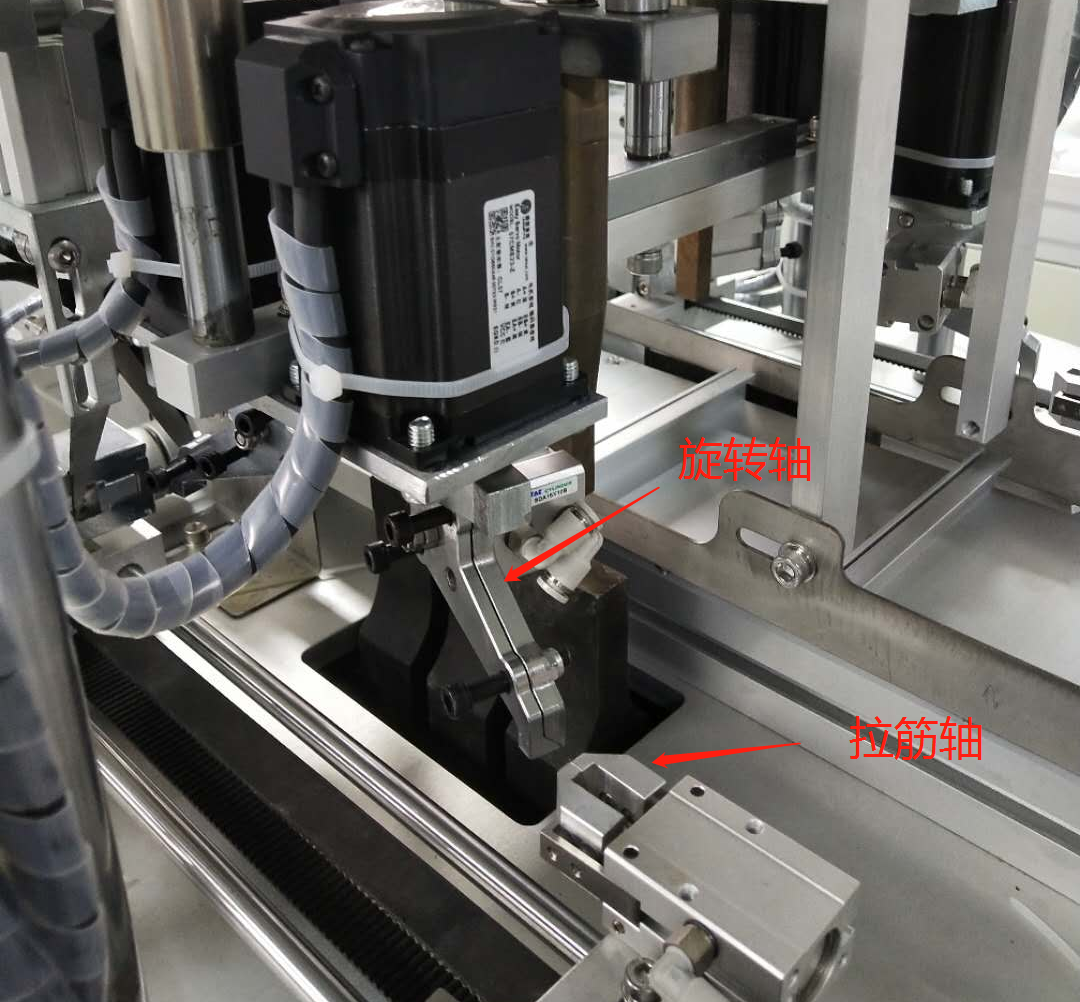
使用Z信號(hào)回零�����,一般適用于電機(jī)運(yùn)行一圈以內(nèi)的場(chǎng)合�����,如旋轉(zhuǎn)機(jī)構(gòu)、絲桿或皮帶機(jī)構(gòu)均可使用�����。���。
(圖1:旋轉(zhuǎn)軸應(yīng)用示例)
閉環(huán)步進(jìn)電機(jī)Z信號(hào)回零的使用步驟
? 選型時(shí)確認(rèn)PLC高速計(jì)數(shù)口的規(guī)格(包括差分或單端�、電壓���、最大頻率等);
? 將Z信號(hào)接入對(duì)應(yīng)高速計(jì)數(shù)口���,單端對(duì)應(yīng)單端接法,差分對(duì)應(yīng)差分接法�。一般編碼器Z信號(hào)直接輸出為5V差分,可以通過(guò)轉(zhuǎn)換電路轉(zhuǎn)成24V單端�����。
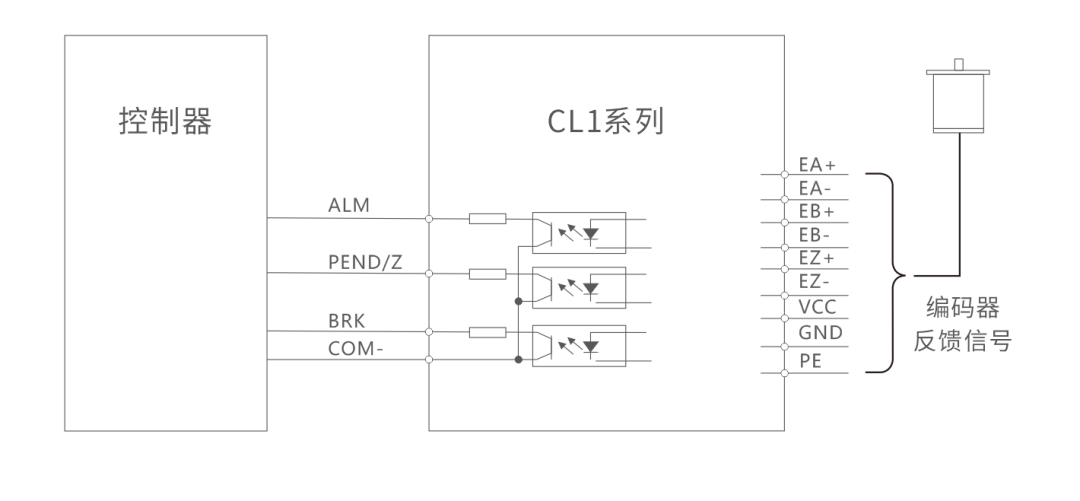
舉個(gè)例子:CL1系列驅(qū)動(dòng)器接線圖
注意:1.使用CL1-507時(shí)��,請(qǐng)選擇帶Z信號(hào)的編碼器延長(zhǎng)線��;
2.使用CL1-507的Z信號(hào)輸出功能時(shí),請(qǐng)將撥碼SW11撥到on位置�����,此時(shí)輸出口“PEND/Z”的功能為Z信號(hào)輸出�����。
閉環(huán)步進(jìn)電機(jī)Z信號(hào)回零的應(yīng)用案例
旋轉(zhuǎn)軸實(shí)際運(yùn)行位置在一圈以內(nèi)�,使用Z信號(hào)回零方式���。電機(jī)的Z信號(hào)進(jìn)入驅(qū)動(dòng)器轉(zhuǎn)化成單端信號(hào)輸出��,接入PLC的高速輸入口�����,回零時(shí)PLC通過(guò)檢測(cè)Z信號(hào)來(lái)進(jìn)行回零動(dòng)作����。電機(jī)的Z信號(hào)輸出信號(hào)寬度與電機(jī)的速度有關(guān)���,速度越快�����,Z信號(hào)寬度越窄�����,所以回零速度控制在1rps以下為宜�����。
支持Z信號(hào)回零的電機(jī)及驅(qū)動(dòng)器選型推薦表
客戶如有選型或應(yīng)用問(wèn)題���,可致電雷賽智能技術(shù)熱線400-885-5501咨詢,
將有擁有10年以上經(jīng)驗(yàn)的資深工程師擔(dān)任解答�����。
雷賽智能閉環(huán)步進(jìn)電機(jī)Z信號(hào)可實(shí)現(xiàn)設(shè)備高精度回零,帶來(lái)“節(jié)省接近開(kāi)關(guān)��、減少安裝空間�����、減少接線成本�、提高系統(tǒng)可靠性”四大優(yōu)勢(shì),為各行業(yè)設(shè)備廠商提升設(shè)備性能����,提高穩(wěn)定可靠性,從而創(chuàng)造更大的價(jià)值與利潤(rùn)�����。









-02.png)